Daly BMS Fernauslesen mit LoRaWAN
05.12.2025
Elektronik | Funk | Software
Der Technik-Blog

05.12.2025

05.06.2025

28.05.2025

25.05.2025
Der SenseCAP T1000 ist ein sehr günstiger LoRaWAN GPS-Tracker mit einem großen Funktionsumfang und zahlreichen Sensoren. Der Hersteller bietet neben der Hardware auch Software-Dienstleistungen an und stellt für seine Endgeräte und Gateways einen eigenen LoRaWAN Netzwerkserver und Cloud-Applikationen bereit. Selbstverständlich kann der SenseCAP T1000 auch an das Community-Netzwerk TTN (The Things Network) angebunden werden. Seeed stellt zwar einen Javascript Decoder für TTN, Helium und weitere Netzwerke bereitstellt, aber die decodierten Payload-Parameter werden in einem sehr speziellen Format (vermutlich für das SenseCAP Portal optimiert) ausgegeben. Viele LoRaWAN Applikationen wie LoWTrack oder der TTN-Mapper funktionieren mit dem originalen Decoder nicht. Aufgrund zahlreicher Anfragen wurde ein "TTN-Freundlicher" Javascript Decoder geschrieben, der mit herkömmlichen Tools wie LoWTrack funktioniert.
Hinweis: Dieser Payload-Decoder wurde sorgfältig mit einem Tracker und mit den Payload-Beispielen von der offiziellen Dokumentation entwickelt und getestet. Es kann nicht garantiert werden, dass dieser Decoder auch mit zukünftigen neueren Firmware-Versionen kompatibel ist. Die Verwendung erfolgt auf eigene Gefahr! Für die Richtigkeit und Funktionalität wird keine Haftung übernommen!
Testinformation
Dieser Decoder wurde mit TTN V3 und der App LoWTrack getestet:
T1000 Software Version: 1.14
T1000 Hardware Version: 1.6
Testdatum: 26.11.2023
/* * Javascript Decoder for Seeed SenseCAP T1000 LoRaWAN GPS Tracker Version 1.1 (@aeqweb) * More Information at: https://www.aeq-web.com/seeed-sensecap-t1000-lorawan-gps-tracker-ttn-payload-decoder/ */ function decodeUplink(input) { const bytes = input['bytes'] const fport = parseInt(input['fPort']) const packetID = bytes[0]; var decoded = {}; if (packetID == 1) { const batt = bytes[1]; const swv = bytes[2] + "." + bytes[3]; const hwv = bytes[4] + "." + bytes[5]; const wm = getWorkMode(bytes[6]); const ps = getPosStrategy(bytes[7]); const hiv = bytes[8] << 8 | bytes[9]; const uiv = bytes[10] << 8 | bytes[11]; const eiv = bytes[12] << 8 | bytes[13]; const so = bytes[14]; const sm = bytes[15]; const me = Boolean(bytes[16]); const mt = bytes[17] << 8 | bytes[18]; const ms = bytes[19] << 8 | bytes[20]; const ml = Boolean(bytes[21]); const mo = bytes[22] << 8 | bytes[23]; const se = Boolean(bytes[24]); const st = bytes[25] << 8 | bytes[26]; const te = Boolean(bytes[27]); const tu = bytes[28] << 8 | bytes[29]; const ts = bytes[30] << 8 | bytes[31]; const th = (bytes[32] << 8 | bytes[33]) / 10; const tl = (bytes[34] << 8 | bytes[35]) / 10; const tr = bytes[36]; const le = Boolean(bytes[37]); const lu = bytes[38] << 8 | bytes[39]; const ls = bytes[40] << 8 | bytes[41]; const lh = bytes[42] << 8 | bytes[43]; const ll = bytes[44] << 8 | bytes[45]; const lw = bytes[46]; var sens = "unkown" var sosm = "unkown" if (so) { sens = "Temp-Light Sen. on" } else if (sm === 0) { sens = "Temp-Light Sen. off" } if (sm) { sosm = "Continuous Mode" } else if (sm === 0) { sosm = "Single Mode" } decoded = { packet: "Heartbeat", battery: batt, softwareV: swv, hardwareV: hwv, workMode: wm, posStrategy: ps, heartbeatInterval: hiv, uplinkInterval: uiv, EventInterval: uiv, sensors: sens, sosMode: sosm, motionEventMode: me, motionThreshold: mt, motionStartInterval: ms, motionlessEvent: ml, motionlessTimeout: mo, shockEvent: se, shockThreshold: st, tempEvent: te, tempInterval: tu, tempSample: ts, tempThresholdMax: th, tempThresholdMin: tl, tempThresholdRule: tr, lightEvent: le, lightInterval: lu, lightSample: ls, lightThresholdMax: lh, lightThresholdMin: ll, lightWarningType: lw } } else if (packetID == 2) { const batt = bytes[1]; const swv = bytes[2] + "." + bytes[3]; const hwv = bytes[4] + "." + bytes[5]; const wm = getWorkMode(bytes[6]); const ps = getPosStrategy(bytes[7]); const hiv = bytes[8] << 8 | bytes[9]; const uiv = bytes[10] << 8 | bytes[11]; const eiv = bytes[12] << 8 | bytes[13]; const so = bytes[14]; const sm = bytes[15]; var sens = "unkown" var sosm = "unkown" if (so) { sens = "Temp-Light Sen. on" } else if (sm === 0) { sens = "Temp-Light Sen. off" } if (sm) { sosm = "Continuous Mode" } else if (sm === 0) { sosm = "Single Mode" } decoded = { packet: "Heartbeat", battery: batt, softwareV: swv, hardwareV: hwv, workMode: wm, posStrategy: ps, heartbeatInterval: hiv, uplinkInterval: uiv, EventInterval: uiv, sensors: sens, sosMode: sosm } } else if (packetID == 5) { const batt = bytes[1]; const wm = getWorkMode(bytes[2]); const ps = getPosStrategy(bytes[3]); const sm = bytes[4]; var sosm = "unkown" if (sm) { sosm = "Continuous Mode" } else if (sm === 0) { sosm = "Single Mode" } decoded = { packet: "Heartbeat", battery: batt, workMode: wm, posStrategy: ps, sosMode: sosm } } else if (packetID == 6) { const sta = (bytes[1] << 16 | bytes[2] << 8 | bytes[3]); const mcnt = bytes[4]; const utc = unixToDateTime(bytes[5] << 24 | bytes[6] << 16 | bytes[7] << 8 | bytes[8]); const lon = (bytes[9] << 24 | bytes[10] << 16 | bytes[11] << 8 | bytes[12]) / 1000000; const lat = (bytes[13] << 24 | bytes[14] << 16 | bytes[15] << 8 | bytes[16]) / 1000000; const tmp = ((bytes[17] & 0x80 ? 0xFFFF << 16 : 0) | bytes[17] << 8 | bytes[18]) / 10; const lgt = (bytes[19] << 8 | bytes[20]); const batt = bytes[21]; decoded = { packet: "GNSS Location & Sensor Data", eventStatus: sta, motionCount: mcnt, utcTime: utc, longitude: lon, latitude: lat, temperature: tmp, light: lgt, battery: batt } } else if (packetID == 9) { const sta = (bytes[1] << 16 | bytes[2] << 8 | bytes[3]); const mcnt = bytes[4]; const utc = unixToDateTime(bytes[5] << 24 | bytes[6] << 16 | bytes[7] << 8 | bytes[8]); const lon = (bytes[9] << 24 | bytes[10] << 16 | bytes[11] << 8 | bytes[12]) / 1000000; const lat = (bytes[13] << 24 | bytes[14] << 16 | bytes[15] << 8 | bytes[16]) / 1000000; const batt = bytes[17]; decoded = { packetType: "GNSS Location", eventStatus: sta, motionCount: mcnt, utcTime: utc, longitude: lon, latitude: lat, battery: batt } } else if (packetID == 0x11) { const utc = unixToDateTime(bytes[5] << 24 | bytes[6] << 16 | bytes[7] << 8 | bytes[8]); const batt = bytes[13]; if (bytes[11] != 0x80 && bytes[9] != 0x80) { const tmp = ((bytes[9] & 0x80 ? 0xFFFF << 16 : 0) | bytes[9] << 8 | bytes[10]) / 10; const lgt = (bytes[11] << 8 | bytes[12]); decoded = { packet: "Positing status", utcTime: utc, temperature: tmp, light: lgt, battery: batt } } else { decoded = { packet: "Positing status", utcTime: utc, battery: batt } } } else if (packetID == 0x0D) { const ec = (bytes[1] << 24 | bytes[2] << 16 | bytes[3] << 8 | bytes[4]); decoded = { packet: "Positioning Timeout", longitude: 0, latitude: 0, errorCode: ec } } else { decoded = { packetType: "unkown", packetID: packetID } } return { data: decoded } } function convertToDec(b) { var return_value = parseInt(b, 16); return return_value; } function unixToDateTime(unixtime) { var date = new Date(unixtime * 1000); var months = ['Jan', 'Feb', 'Mar', 'Apr', 'May', 'Jun', 'Jul', 'Aug', 'Sep', 'Oct', 'Nov', 'Dec']; var hours = date.getHours(); var minutes = "0" + date.getMinutes(); var seconds = "0" + date.getSeconds(); var year = date.getFullYear(); var month = months[date.getMonth()]; var day = date.getDate(); var DateTime = day + '-' + month + '-' + year + ' ' + hours + ':' + minutes.substr(-2) + ':' + seconds.substr(-2); return DateTime; } function getPosStrategy(ps) { var psText = ""; switch (ps) { case 0: psText = "Only GNSS"; break; case 1: psText = "Only WiFi"; break; case 2: psText = "WiFi + GNSS"; break; case 3: psText = "GNSS + WiFi"; break; case 4: psText = "Only Bluetooth"; break; case 5: psText = "Bluetooth + WiFi"; break; case 6: psText = "Bluetooth + GNSS"; break; case 7: psText = "Bluetooth + WiFi + GNSS"; break; default: psText = "unkown"; } return psText; } function getWorkMode(wm) { var wmText = ""; switch (wm) { case 0: wmText = "Standby Mode"; break; case 1: wmText = "Periodic Mode"; break; case 2: wmText = "Event Mode"; break; default: wmText = "unkown"; } return wmText; }


LoWTRACK ist eine App für LoRaWAN GPS-Tracker. LoWTRACK zeigt Positionsdaten, Gateway-Details und viele Informationen über das verbundene LoRaWAN-Netzwerk an.
Weiterlesen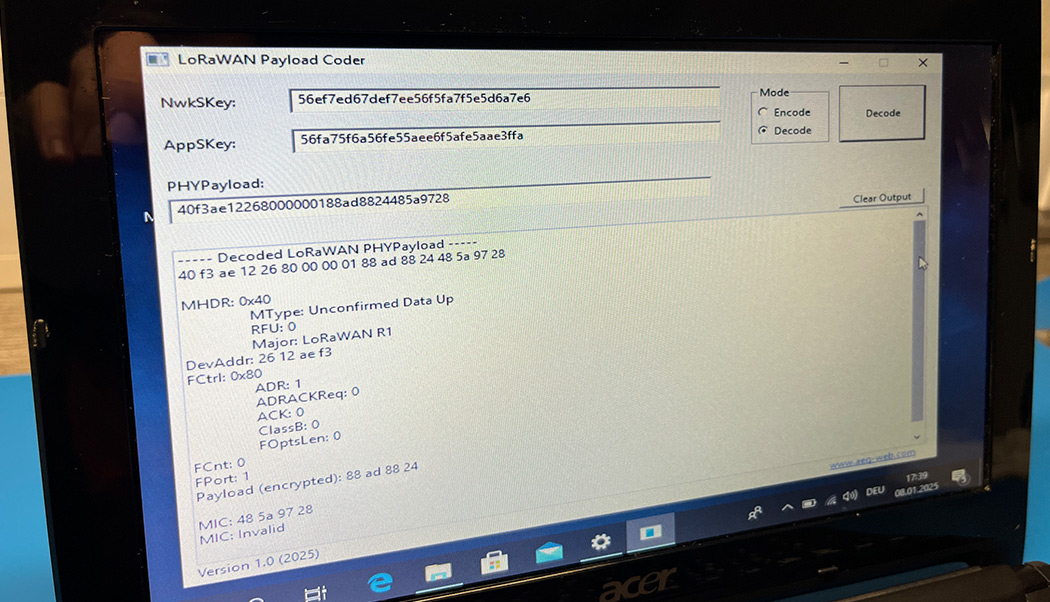
Das Programm LoRaWAN Packet Coder für Windows kann LoRaWAN Telegramme verschlüsseln und entschlüsseln.
Weiterlesen
05.12.2025
05.06.2025
28.05.2025
25.05.2025
AEQ-WEB ist ein Blog von Alex & Andi, der sich mit Elektronik, Funk & Software beschäftigt
WeiterlesenAEQ-WEB © 2015-2026 All Right Reserved